I am done with the gimbal of the joystick. Now off to give it a shell and a handle! Z-axis twist is a little painful to do the way I want to as it makes for quite a large palm rest (depending on spring size selected of course). I think I will get a feel first for the right dimensions on the stick then move it over to the delta once sorted.
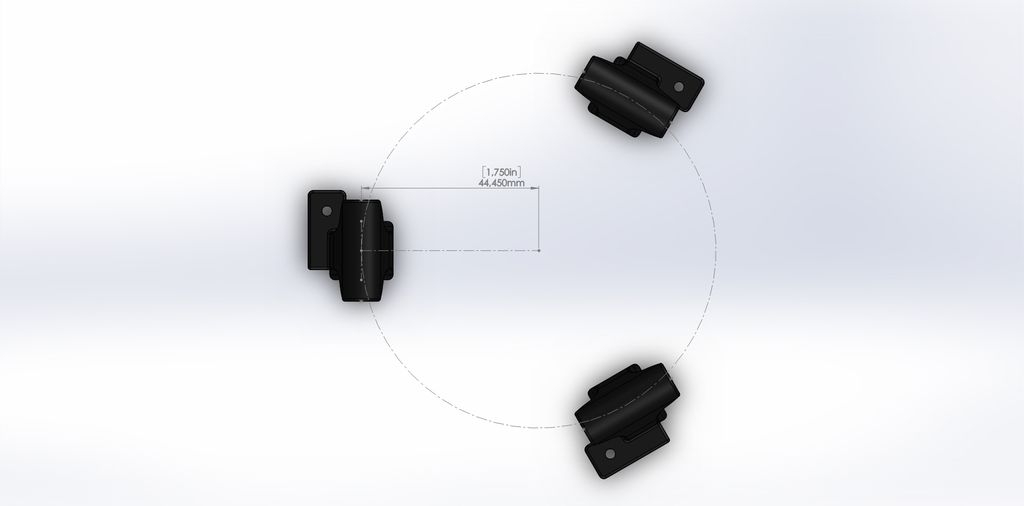
ALTHOUGH - I will get started on redrawing the delta soon. I am making my own bearing pillow-blocks as I want to have the tension springs mounted on the pillow blocks. I still need to decide if they should be 4DOF or 5DOF restricted when inserting. The pillow blocks will all have an extra say 20mm piece added onto it for mounting purposes. I plan to have that on the stick and throttle. I will need to make sure my printer is set up very well before printing of course!
Thanks for pointing this stuff out though. I may have forgotten it myself and had to waste time looking for it! I did a BEng and now am doing an MSc in Comp. Sci. so code is my thing. These kind of things are my speciality in fact. So it was actually fun to go and look through the code.
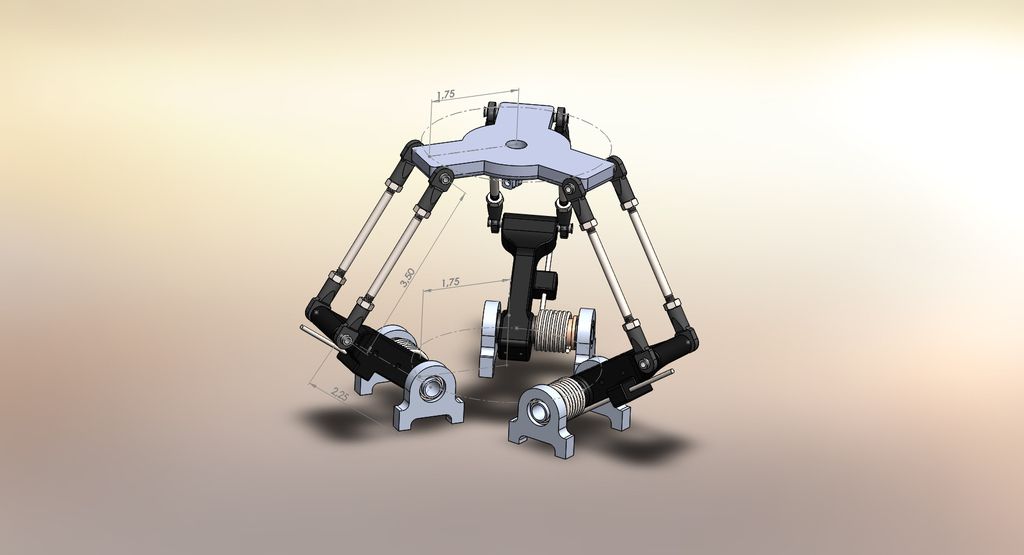
I need to make my pillow block which holds the pivot arm at 60 degrees still... Not difficult. Just want to do it in a way that is space efficiently.
I have an idea on those limits! If you extend the bottom of the pivot arm, you can place physical limits on the throttle by mounting a switch. That would get you the feedback desired! It could swing into a small compression spring that activates a button or it could just hit against the button requiring you to give it a little oomph to press it. A 5N switch should suffice along with a decent centring force.
It is too fun to keep modding this! I am waiting for all my parts to arrive before I can start my own build but I am trying to fix the things I would personally dislike for myself. I wouldn't want the boost on the limits for example. I plan on using a thumb button for that. I plan on having a throttle slider too on the thumb so I can make smart use of the strafing capabilities of the delta in combination with the match speed command.
When I fly my hull B I won't need the Delta until I do a landing. Then I may kiss it when done

I don't know how agile it will be when empty. I can't imagine it being anything nice when full!